
こんばんは、ファルコンM です。
PIC のharmony ライブラリを使って、ESP-WROOM-02と通信する方法。
harmony はPIC32bit で使えるライブラリ。
開発環境
- マイコン PIC32MZ0512EFE064
PICのポート設定
- UART TX … PIN45 RD11
- UART RX … PIN44 RD10
- ESP-WROOM-02 の電源 … PIN61 RE1 ( ※ こちらの環境特有 )
プロジェクト作成
MPLAB を立ち上げ File → New Project を選択する。
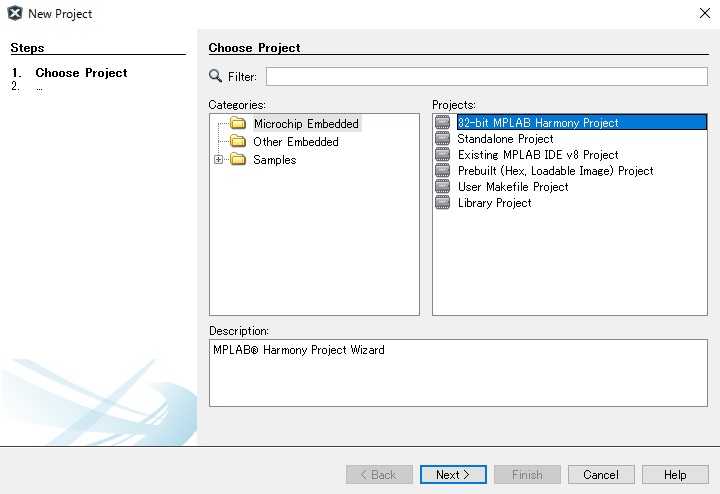
Categories : Microchip Embedded、Projects : 32-bit MPLAB Harmony Project を選択する。
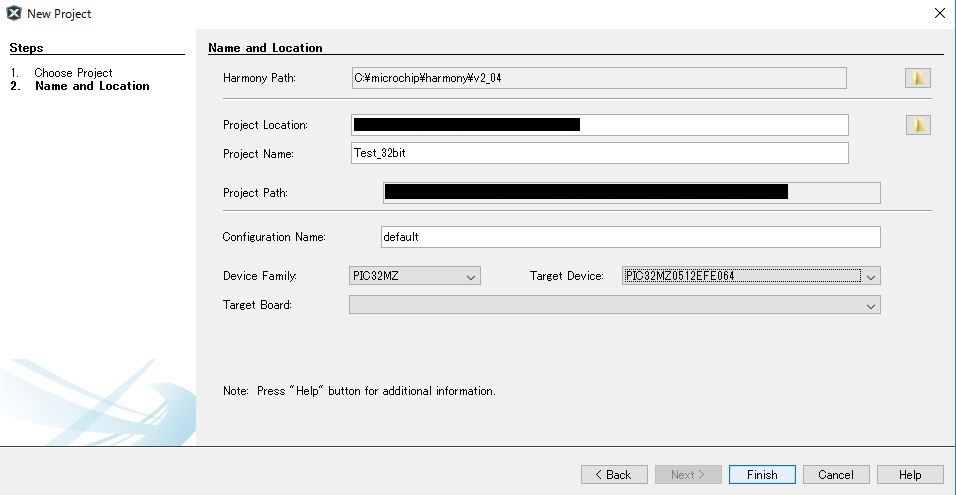
Project Location にプロジェクトのパス、Project Name にプロジェクト名、Target Device でマイコンを選択する。
Project Name は Test_32bitと入力する。
Target Device は今回使用する PIC32MZ512EFE064 を選択する。
Finish を押すと、プロジェクトが作成される。
Harmony の設定
プロジェクトを作成したら、Harmony のビューが自動的に立ち上がる。立ち上がらないときは、Tools → Eembedded → MPLAB Harmony Configurator を選択する。
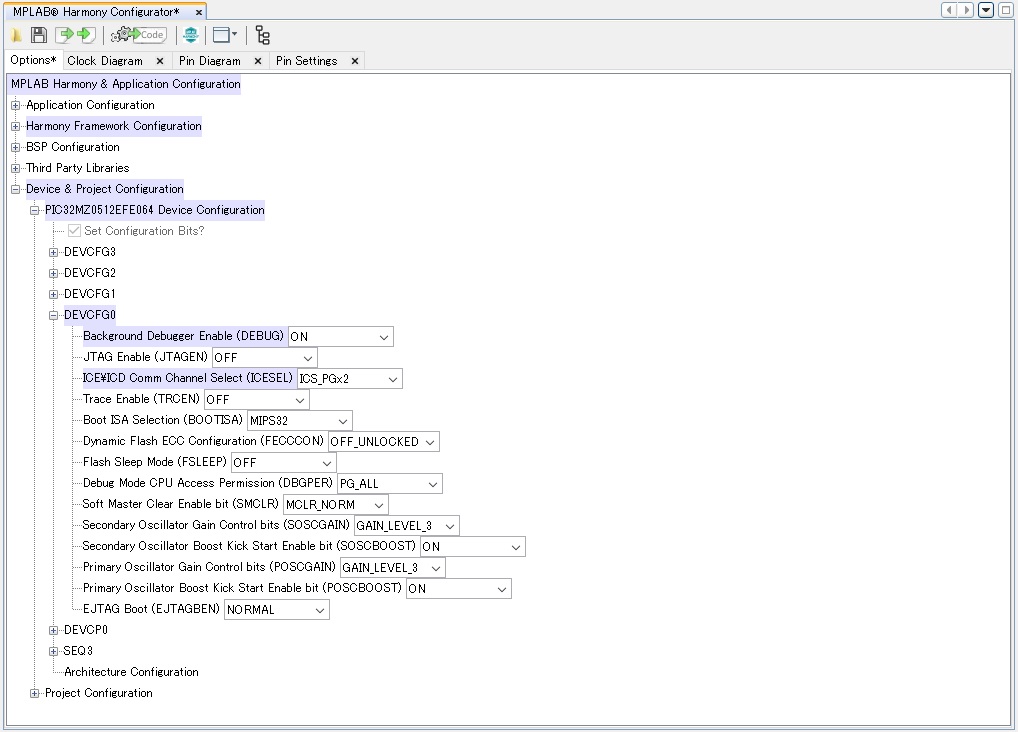
Options → MPLAB Harmony & Application Configuration → Device & Project Configuration で PIC32MZ0512EFE064 Device Configuration を選択する。
ここで、コンフィグレーションビットを設定する。
DEVCFG0 で Background Debugger Enable( DEBUG ) をON にする。これを設定しないとデバックができない。
また、ICE\ICD Comm Channel Select を設定する。デバッカとマイコンが繋がるポートを選択。これは、回路図を見て設定する。
私の環境は、デバッカとつなぐピンは PGEC2、PGED2 を使用していたので、ICS_PGx2 とした。
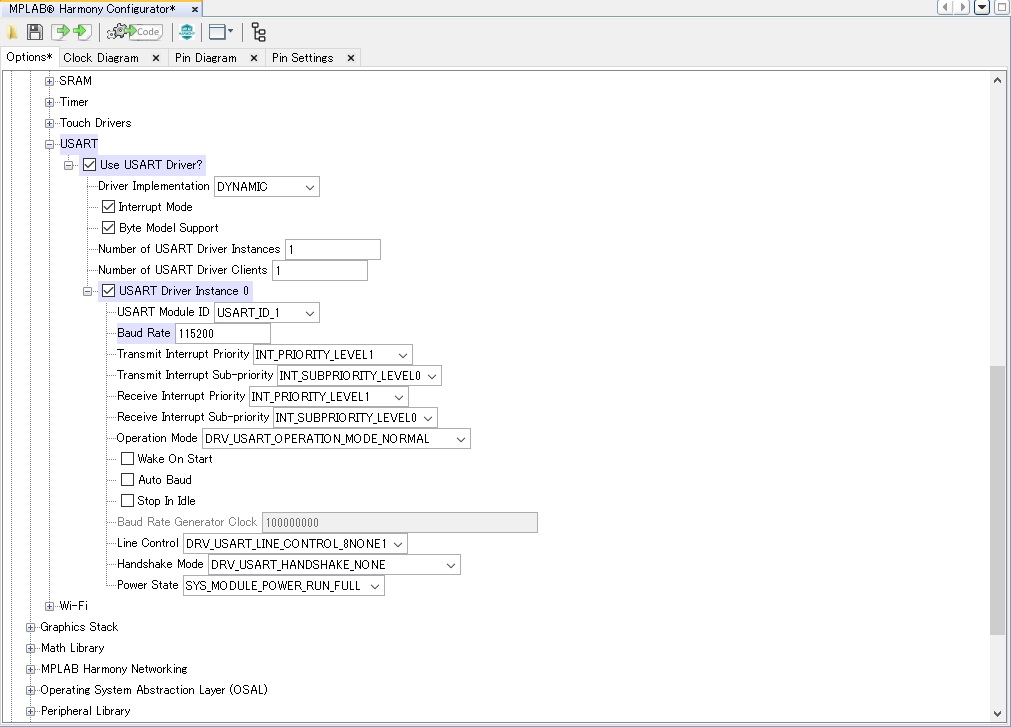
Options → MPLAB Harmony & Application Configuration → Harmony Framework Configuration → Drivers を選択。
USART で上記設定をする。
USART Driver Instance0 にチェックを入れ、Band Rate を115200 に変更しただけ。
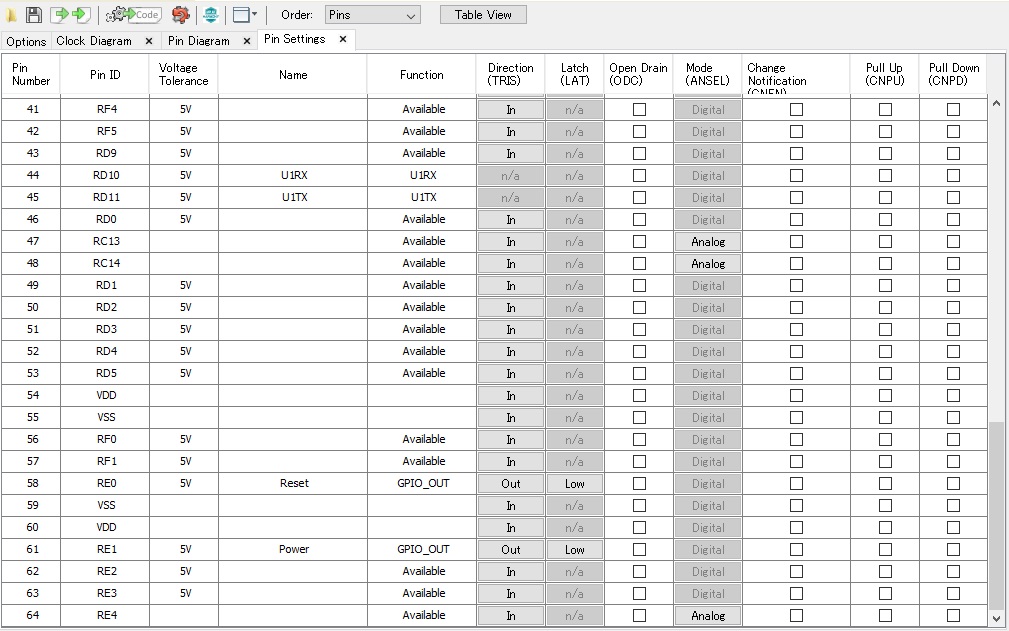
PinSettings で設定を変更する。44、45、61 ピンでFunction で選択する。
44ピン U1RX、45ピン U1TX、61ピン GPIO_OUT とした。
61ピンは Name も変更した。Name を変更しないと、コード出力した時、ポート設定の定義が出力されない。
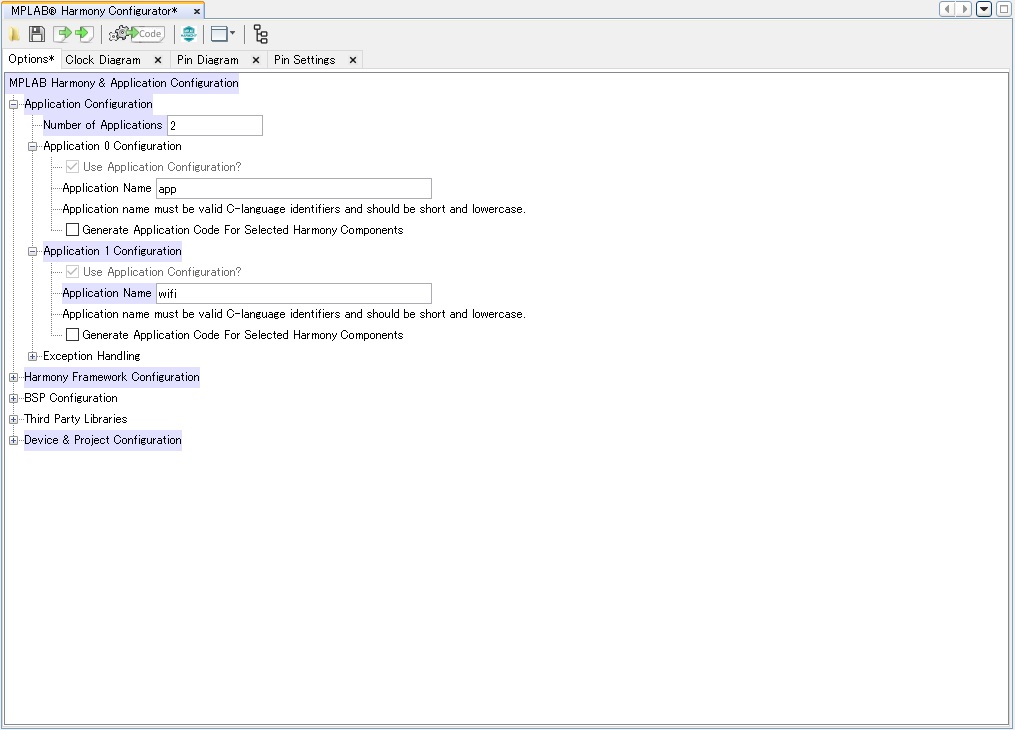
Options → MPLAB Harmony & Application Configuration → Application Configuration を選択。wifi アプリケーションを追加する。
Number of Applications を2とする。
新しく Application 1 Configuration が出るので、Application Name にwifi と入力する。
以上でharmony の設定が完了した。コード生成のボタンを押してコードを生成する。( ↑の写真の左から5番目のボタン。
ソースコード修正
- 起動したら、ESP-WROOM-02 の電源を入れる
- ESP-WROOM-02 から”ready\r\n” を受信したら、起動完了
するだけのプログラム。
以下を修正する。
wifi.h
// enum 追加
typedef enum
{
WIFI_STATE_START_INIT=0,
WIFI_STATE_START_EXE,
WIFI_STATE_START_ALLRECEIVE,
WIFI_STATE_START_DONE,
} WIFI_STATES_START;
// WIFI_DATA 構造体にメンバを追加
typedef struct
{
- 略 -
DRV_HANDLE usartHandle;
WIFI_STATES_START stateStart;
uint8_t idxStartRecv;
void (*callbackStart)();
} WIFI_DATA;
// 外部関数のプロトタイプ宣言
void WIFI_Initialize ( void );
void WIFI_Start( void (*callback)(void) );
wifi.c
// 定義
#define D_WIFI_READY "ready\r\n"
// 内部関数宣言
static void startTasks(void);
static void receiveData(const SYS_MODULE_INDEX index);
// WIFI_Tasks 関数にコード追加
void WIFI_Tasks ( void )
{
- 略 -
case WIFI_STATE_SERVICE_TASKS:
{
startTasks(); // 追加
break;
}
- 略 -
}
// 関数追加
void WIFI_Start( void (*callback)(void) )
{
if( wifiData.stateStart != WIFI_STATE_START_INIT )
{
return;
}
// USART 開始
wifiData.usartHandle = DRV_USART_Open(DRV_USART_INDEX_0, DRV_IO_INTENT_READWRITE|DRV_IO_INTENT_BLOCKING );
if ( wifiData.usartHandle == DRV_HANDLE_INVALID )
{
return;
}
// 受信コールバック設定
DRV_USART_ByteReceiveCallbackSet(DRV_USART_INDEX_0, receiveData);
// コールバック設定
wifiData.callbackStart = callback;
wifiData.stateStart = WIFI_STATE_START_EXE;
// Wifi モジュール電源ON
PowerOn();
return;
}
static void startTasks(void)
{
switch(wifiData.stateStart)
{
case WIFI_STATE_START_ALLRECEIVE:
{
if( wifiData.callbackStart != NULL )
{
wifiData.callbackStart();
}
wifiData.stateStart = WIFI_STATE_START_DONE;
break;
}
default:
break;
}
return;
}
static void receiveData(const SYS_MODULE_INDEX index){
uint8_t data;
if(!DRV_USART_ReceiverBufferIsEmpty(wifiData.usartHandle))
{
data = DRV_USART_ReadByte(wifiData.usartHandle);
if( data == D_WIFI_READY[wifiData.idxStartRecv])
{
wifiData.idxStartRecv++;
if( wifiData.idxStartRecv >= strlen(D_WIFI_READY))
{
wifiData.stateStart = WIFI_STATE_START_ALLRECEIVE;
}
}
}
}
app.c
// 内部関数宣言
static void callbackStart(void);
// コード追加
void APP_Tasks ( void )
{
-略-
case APP_STATE_SERVICE_TASKS:
{
WIFI_Start(callbackStart);
break;
}
-略-
}
// コールバック関数の追加
static void callbackStart(void)
{
return;
}
以上。このコードを動かせば、wifi モジュールと通信できる。
デバックできない場合は、こちらの記事を参考に。



コメントを残す